
Raspberry Pi Pico を対話モード(インタラクティブモード)で実行する3つの方法を紹介します。
何で?と思いますが実行環境と使用用途で使い分けしたかったからです。私の Raspberry Pi Pico の使い方が、ごくまれな奇怪な使い方だったので他にはいないと思いますが一応紹介だけしておきます。
はじめに
Raspberry Pi Pico とは、Pythonで動かせるマイコン ボードのことです。

アマゾンだと割高になってますが、私はスイッチサイエンスで550円で買いました。送料が発生したのでまとめ買いです。
この値段とこのサイズで Python が動かせるということだったので、前から興味があったのです。私の奇怪な使い方と言うのは、オンラインゲームのマクロを動かすために使っています。キーボードやマウスをエミュレートできるので、Pythonで画像認識させてキーボードやマウスを操作させています。この話はまた追い追いできたらいいなと思います。まだ手探り感覚で動かしているので。
USBケーブル(USB(Aオス)-USB(MicroBオス))
余談ですが USBケーブル が必須です。A-MicroB のものが。

インタラクティブ実行するツールの紹介
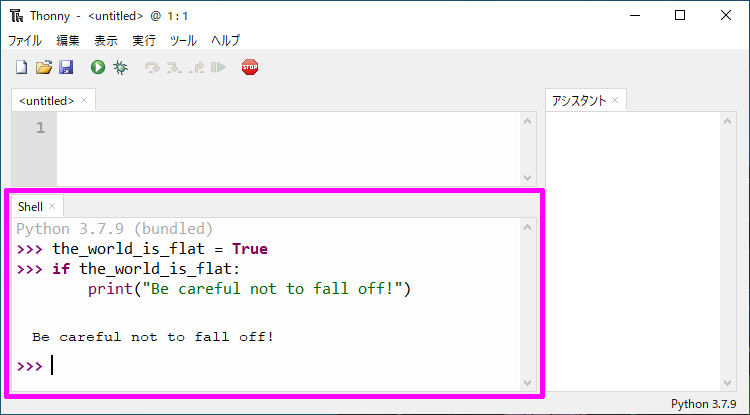
Thonny
公式ツールです。これさえインストールしておけば問題なしです。
TeraTerm
対話モードなら TeraTerm でもできます。
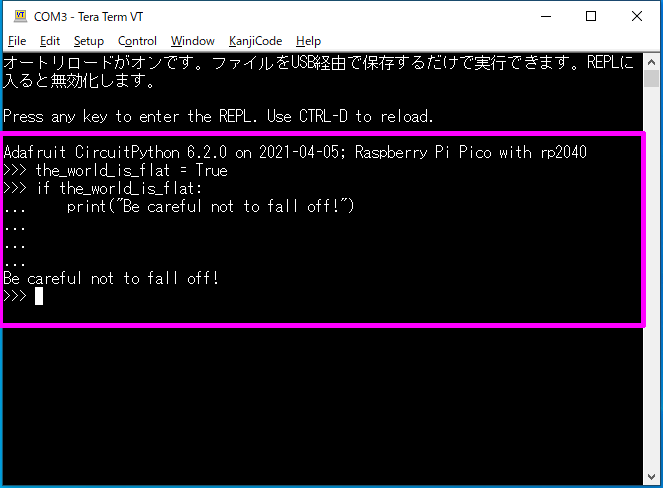
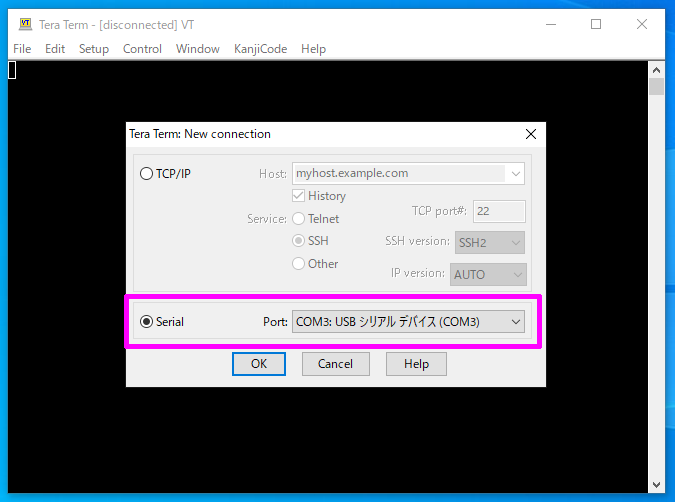
シリアルモードで接続すると使えます。
Web Serial API
Google Chromeで利用できるシリアル通信で動かすこともできます。
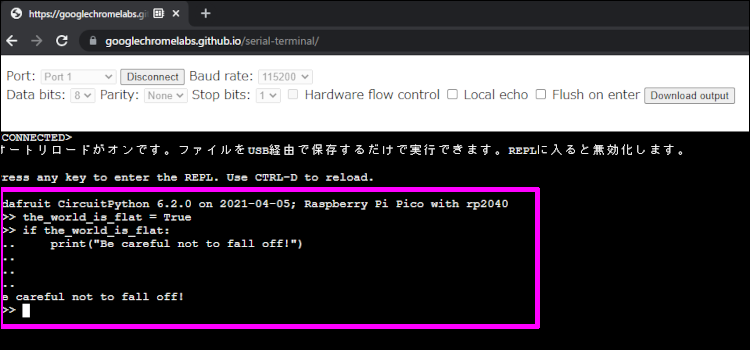
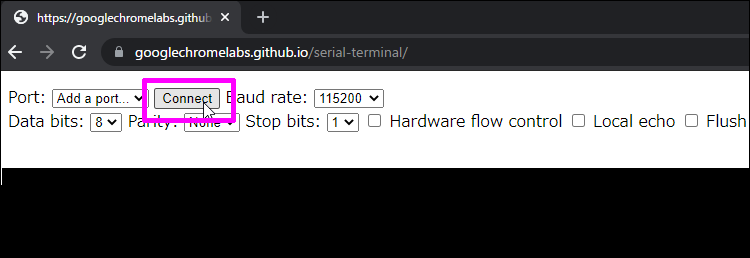
例として今回は デモページ を利用します。
「Connect」を押して、
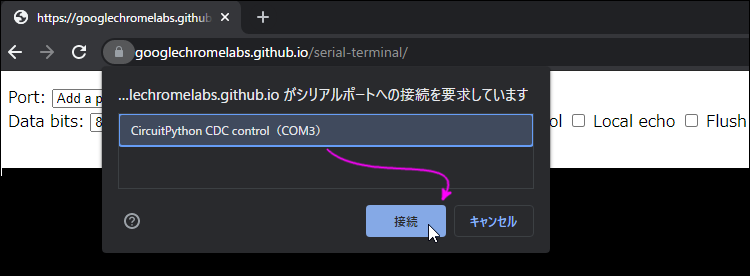
「CircuitPython CDC control (COM3)」を選択して「接続」を押せば使えるようになります。
おわりに
使い勝手はそれぞれ違いますが、できることは全て同じです。
自分が使いやすいと思ったのを使えばいいと思います。
私は「Web Serial API」を使います。バックグラウンドで常に動かしていたいので。